


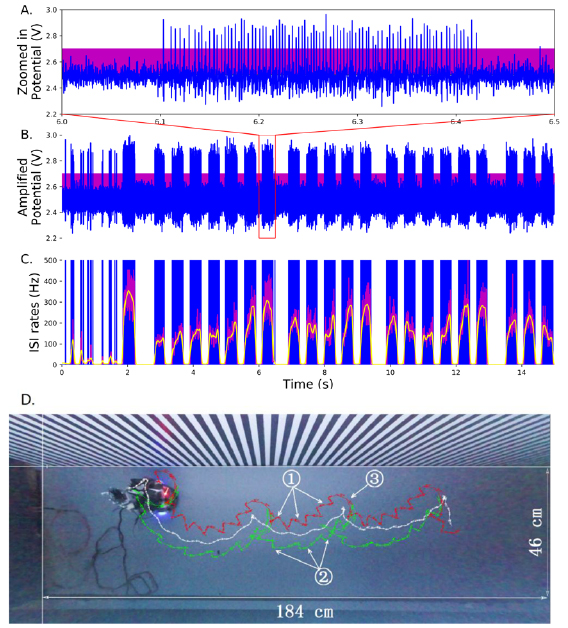
We have designed a bio-hybrid fly-robot interface (FRI) to study sensorimotor control in insects. The FRI consists of a miniaturized recording platform mounted on a two-wheeled robot and is controlled by the neuronal spiking activity of an identified visual interneuron, the blowfly H1-cell. For a given turning radius of the robot, we found a proportional relationship between the spike rate of the H1-cell and the relative distance of the FRI from the patterned wall of an experimental arena. Under closed-loop conditions during oscillatory forward movements biased towards the wall, collision avoidance manoeuvres were triggered whenever the H1-cell spike rate exceeded a certain threshold value. We also investigated the FRI behaviour in corners of the arena. The ultimate goal is to enable autonomous and energy-efficient manoeuvrings of the FRI within arbitrary visual environments.
Learn about our two Decals!
 Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.
Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.Berkeley BioDesign Community
 Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.
Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.

I imagine that the neurological circuits underlying these processes are governed by both 2d spacing maps with their brains as…
to reduce the impact of car accidents, it may be possible to study the force diverting physics of cockroaches to…
you see this type of head-bobbing stability in many avian creatures related to pigeons like chickens. the head ability to…
not like they taught horses how to run! this is an example of convergent evolution where both sea creatures and…
The brain functions in a similar way with neuronal connections. our brains are able to utilize the multiplicity of connections…