
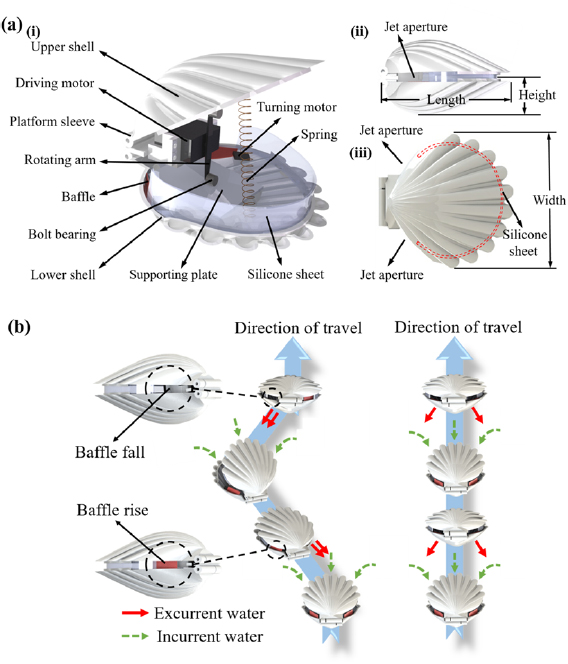
Inspired by a scallop’s strong underwater propulsion mechanism, we designed and prototyped a scallop robot capable of clapping and swimming. In this work, an artificial velum was used to work as a check valve to stimulate the robot’s swimming. A couple of supporting plates were fixed on the robot shells to achieve the modulation of clapping process of the shells. The scallop robot can move at a maximum average and instantaneous speed of 3.4 and 4.65 body lengths per second, respectively. The effect of the supporting plates, the artificial velum, as well as the clapping frequency and amplitude on the swimming performance of the scallop robot was also experimentally evaluated. By tuning the sizes of the jet apertures, the scallop robot is capable of achieving high mobility actions such as turning. We also obtained the aperture ratio with the corresponding turning radius. This scallop robot provides a new propulsion mechanism in underwater bionic robots; it is also of help to understand the swimming principle of scallops in terms of jet propulsion and clapping motion.
Learn about our two Decals!
 Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.
Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.Berkeley BioDesign Community
 Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.
Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.

I imagine that the neurological circuits underlying these processes are governed by both 2d spacing maps with their brains as…
to reduce the impact of car accidents, it may be possible to study the force diverting physics of cockroaches to…
you see this type of head-bobbing stability in many avian creatures related to pigeons like chickens. the head ability to…
not like they taught horses how to run! this is an example of convergent evolution where both sea creatures and…
The brain functions in a similar way with neuronal connections. our brains are able to utilize the multiplicity of connections…