
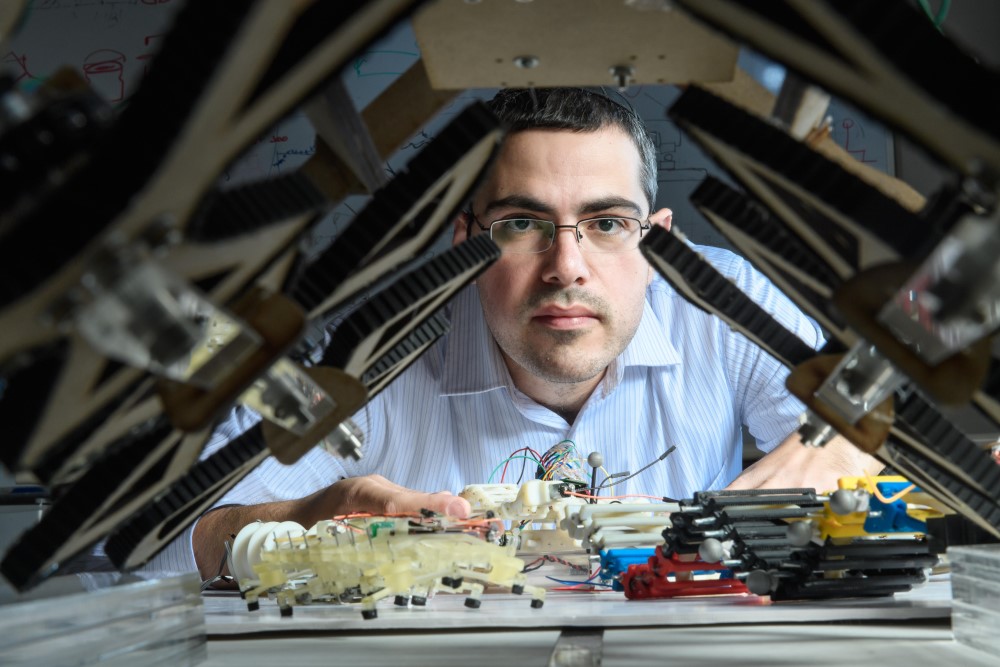
Dr. David, the director of the Bioinspired and Medical Robotics Laboratory, engineered the “Minimally actuated Reconfigurable Continuous Track Robot” for search and rescue situations in complicated terrain. It can purposed for other applications such excavation, agriculture and crawling inside pipes for industrial maintenance. One Dr. David’s robot is also the SAW (single actuator wave) robot which was initlally inspired by miniature biological organism which swim by undulating their tails. Creating this robot was very challenging. Although the equations showed that a single motor is needed to develop the wave motion, realizing this motion mechanically was not simple. I found the solution when I was teaching the course Mechanical design and realized that the side projection of a spring is a sine function that advances when the spring is rotated The main purpose of the SAW robot is to crawl inside the body. Our latest design is less than 1.5 cm wide and it is capable of crawling inside the intestine of the pig (ex-vivo). Currently, we are seeking funding to develop smaller robots to crawl inside the digestive system. We believe this is very possible.
Learn about our two Decals!
 Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.
Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.Berkeley BioDesign Community
 Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.
Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.

I imagine that the neurological circuits underlying these processes are governed by both 2d spacing maps with their brains as…
to reduce the impact of car accidents, it may be possible to study the force diverting physics of cockroaches to…
you see this type of head-bobbing stability in many avian creatures related to pigeons like chickens. the head ability to…
not like they taught horses how to run! this is an example of convergent evolution where both sea creatures and…
The brain functions in a similar way with neuronal connections. our brains are able to utilize the multiplicity of connections…