
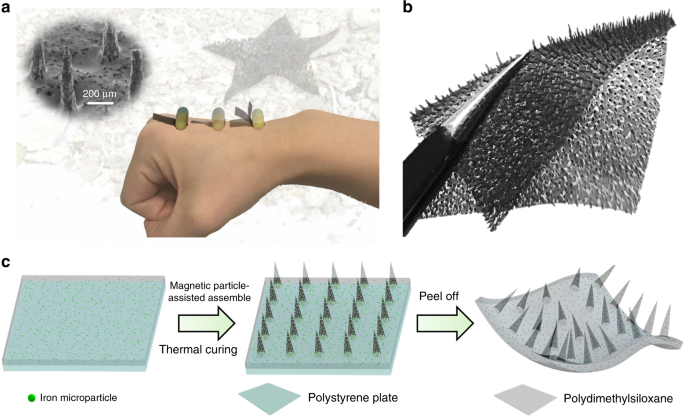
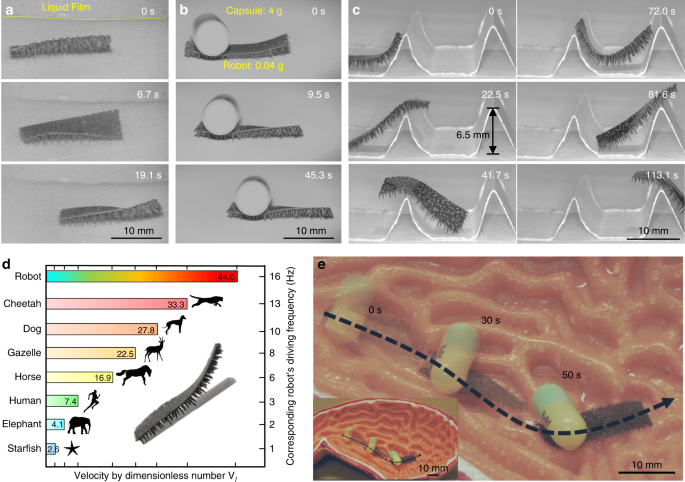
Paper Abstract: Developing untethered millirobots that can adapt to harsh environments with high locomotion efficiency is of interest for emerging applications in various industrial and biomedical settings. Despite recent success in exploiting soft materials to impart sophisticated functions which are not available in conventional rigid robotics, it remains challenging to achieve superior performances in both wet and dry conditions. Inspired by the flexible, soft, and elastic leg/foot structures of many living organisms, here we report an untethered soft millirobot decorated with multiple tapered soft feet architecture. Such robot design yields superior adaptivity to various harsh environments with ultrafast locomotion speed (>40 limb length/s), ultra-strong carrying capacity (>100 own weight), and excellent obstacle-crossing ability (stand up 90° and across obstacle >10 body height). Our work represents an important advance in the emerging area of bio-inspired robotics and will find a wide spectrum of applications.
Learn about our two Decals!
 Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.
Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.Berkeley BioDesign Community
 Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.
Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.

I imagine that the neurological circuits underlying these processes are governed by both 2d spacing maps with their brains as…
to reduce the impact of car accidents, it may be possible to study the force diverting physics of cockroaches to…
you see this type of head-bobbing stability in many avian creatures related to pigeons like chickens. the head ability to…
not like they taught horses how to run! this is an example of convergent evolution where both sea creatures and…
The brain functions in a similar way with neuronal connections. our brains are able to utilize the multiplicity of connections…