

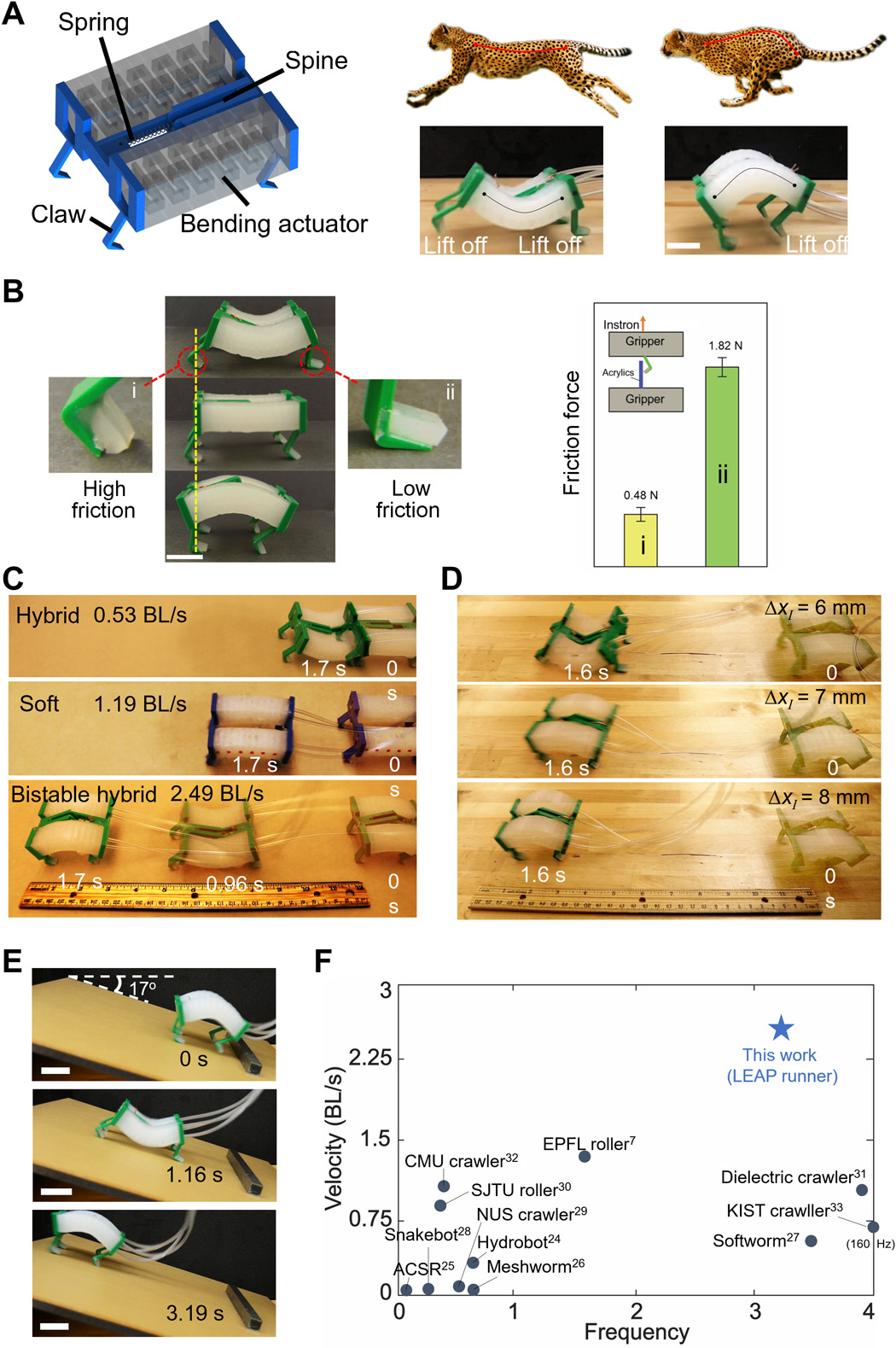
Soft machines typically exhibit slow locomotion speed and low manipulation strength because of intrinsic limitations of soft materials. Here, we present a generic design principle that harnesses mechanical instability for a variety of spine-inspired fast and strong soft machines. Unlike most current soft robots that are designed as inherently and unimodally stable, our design leverages tunable snap-through bistability to fully explore the ability of soft robots to rapidly store and release energy within tens of milliseconds. We demonstrate this generic design principle with three high-performance soft machines: High-speed cheetah-like galloping crawlers with locomotion speeds of 2.68 body length/s, high-speed underwater swimmers (0.78 body length/s), and tunable low-to-high-force soft grippers with over 1 to 103 stiffness modulation (maximum load capacity is 11.4 kg). Our study establishes a new generic design paradigm of next-generation high-performance soft robots that are applicable for multifunctionality, different actuation methods, and materials at multiscales.
Learn about our two Decals!
 Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.
Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.Berkeley BioDesign Community
 Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.
Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.

I imagine that the neurological circuits underlying these processes are governed by both 2d spacing maps with their brains as…
to reduce the impact of car accidents, it may be possible to study the force diverting physics of cockroaches to…
you see this type of head-bobbing stability in many avian creatures related to pigeons like chickens. the head ability to…
not like they taught horses how to run! this is an example of convergent evolution where both sea creatures and…
The brain functions in a similar way with neuronal connections. our brains are able to utilize the multiplicity of connections…