
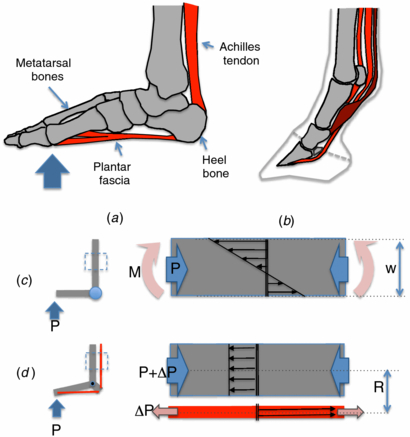
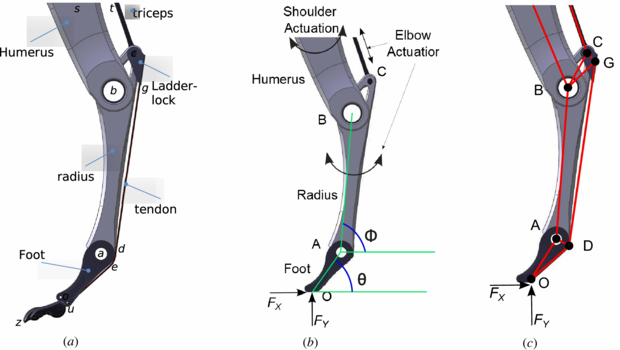
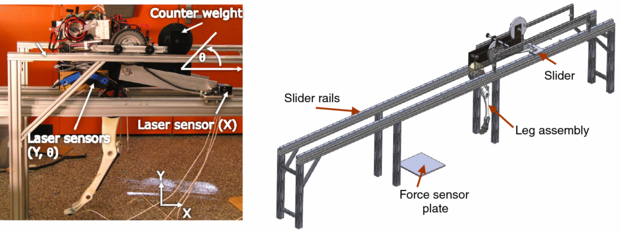
High-speed terrestrial locomotion inevitably involves high acceleration and extensive loadings on the legs. This imposes a challenging trade-off between weight and strength in leg design. This paper introduces a new design paradigm for a robotic leg inspired by musculoskeletal structures. The central hypothesis is that employing a tendon–bone co-location architecture not only provides compliance in the leg, but can also reduce bone stresses caused by bending on structures. This hypothesis is applied to a leg design, and verified by simulations and the experiments on a prototype. In addition, we also present an optimization scheme to maximize the strength to weight ratio. Using the tendon–bone co-location architecture, the stress on the bone during a stride is reduced by up to 59%. A new foam-core prototyping technique enables creating structural characteristics similar to mammalian bones in the robotic leg. This method allows us to use lighter polymeric structures that are cheaper and quicker to fabricate than conventional fabrication methods, and can eventually greatly shorten the design iteration cycle time.
Learn about our two Decals!
 Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.
Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.Berkeley BioDesign Community
 Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.
Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.

I imagine that the neurological circuits underlying these processes are governed by both 2d spacing maps with their brains as…
to reduce the impact of car accidents, it may be possible to study the force diverting physics of cockroaches to…
you see this type of head-bobbing stability in many avian creatures related to pigeons like chickens. the head ability to…
not like they taught horses how to run! this is an example of convergent evolution where both sea creatures and…
The brain functions in a similar way with neuronal connections. our brains are able to utilize the multiplicity of connections…