
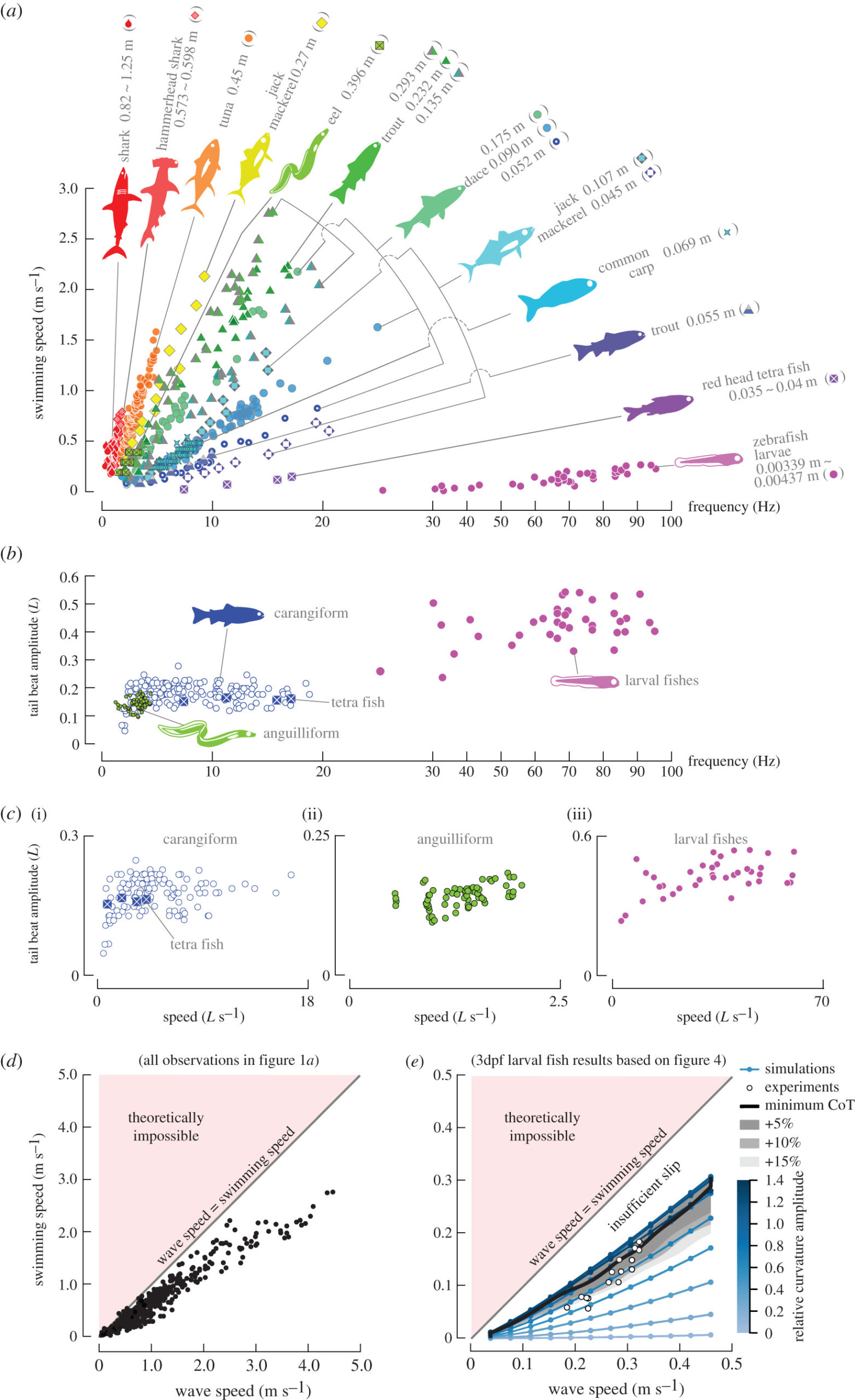
Energetic expenditure is an important factor in animal locomotion. Here we test the hypothesis that fishes control tail-beat kinematics to optimize energetic expenditure during undulatory swimming. We focus on two energetic indices used in swimming hydrodynamics, cost of transport and Froude efficiency. To rule out one index in favour of another, we use computational-fluid dynamics models to compare experimentally observed fish kinematics with predicted performance landscapes and identify energy-optimized kinematics for a carangiform swimmer, an anguilliform swimmer and larval fishes. By locating the areas in the predicted performance landscapes that are occupied by actual fishes, we found that fishes use combinations of tail-beat frequency and amplitude that minimize cost of transport. This energy-optimizing strategy also explains why fishes increase frequency rather than amplitude to swim faster, and why fishes swim within a narrow range of Strouhal numbers. By quantifying how undulatory-wave kinematics affect thrust, drag, and power, we explain why amplitude and frequency are not equivalent in speed control, and why Froude efficiency is not a reliable energetic indicator. These insights may inspire future research in aquatic organisms and bioinspired robotics using undulatory propulsion.
Learn about our two Decals!
 Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.
Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.Berkeley BioDesign Community
 Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.
Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.

I imagine that the neurological circuits underlying these processes are governed by both 2d spacing maps with their brains as…
to reduce the impact of car accidents, it may be possible to study the force diverting physics of cockroaches to…
you see this type of head-bobbing stability in many avian creatures related to pigeons like chickens. the head ability to…
not like they taught horses how to run! this is an example of convergent evolution where both sea creatures and…
The brain functions in a similar way with neuronal connections. our brains are able to utilize the multiplicity of connections…