
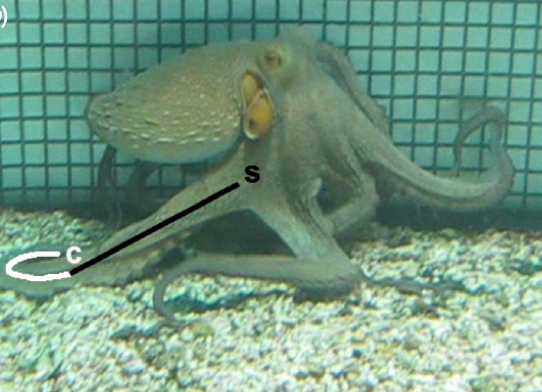
With the implementations of new technologies in creating soft robotics, one significant challenge to their development has been the ability to exert effective forces of control. The following study looks towards the Octopus (Octopus vulgaris), specifically noting how it can manipulate its limbs to crawl and grasp objects. To test the hypotheses, the researchers constructed a silicone arm to mimic the crawling movement of octopus arms and its other functions. Results from this application provide key insight to constructing more complex soft robots that require minimum control to complete diverse ranges of tasks.
Learn about our two Decals!
 Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.
Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.Berkeley BioDesign Community
 Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.
Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.

I imagine that the neurological circuits underlying these processes are governed by both 2d spacing maps with their brains as…
to reduce the impact of car accidents, it may be possible to study the force diverting physics of cockroaches to…
you see this type of head-bobbing stability in many avian creatures related to pigeons like chickens. the head ability to…
not like they taught horses how to run! this is an example of convergent evolution where both sea creatures and…
The brain functions in a similar way with neuronal connections. our brains are able to utilize the multiplicity of connections…