
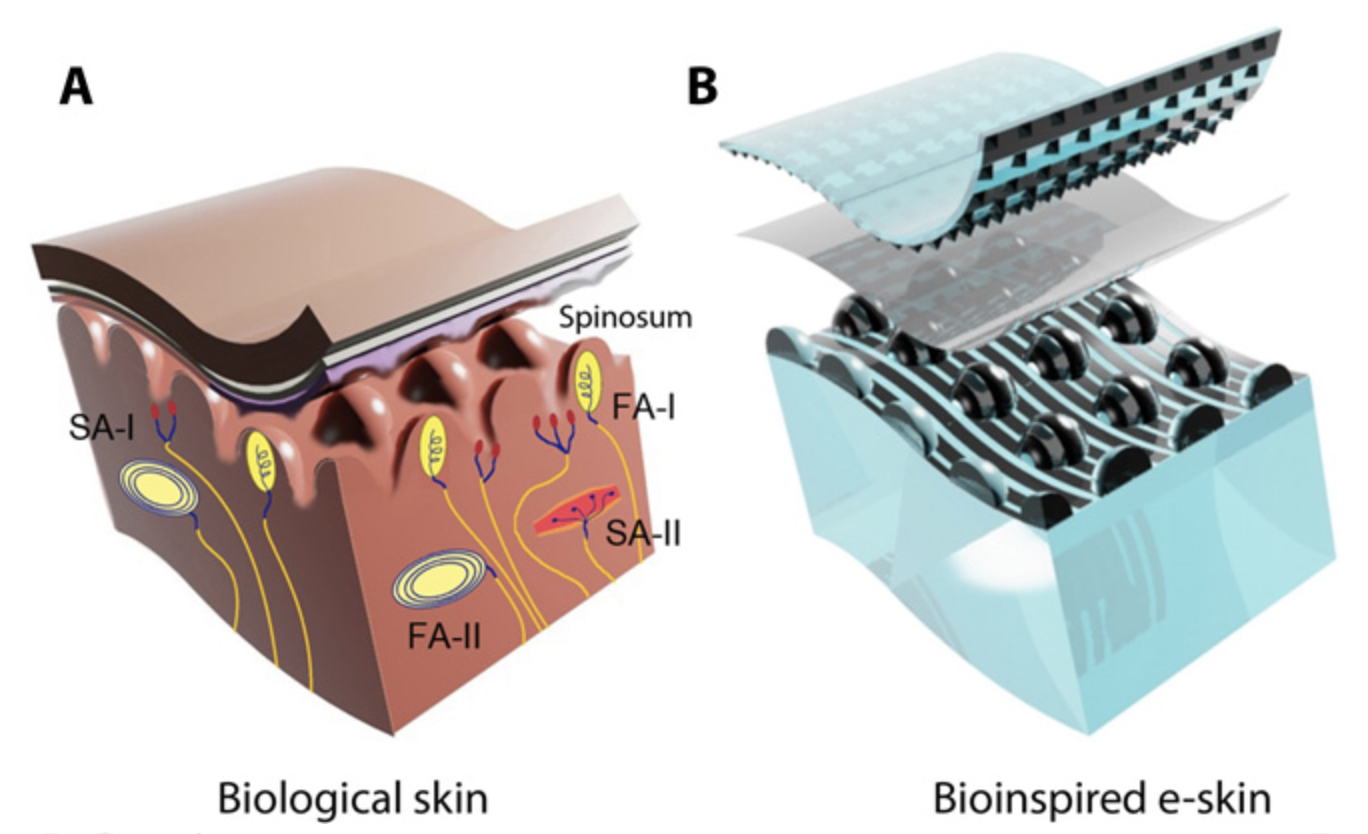
Tactile sensing is required for the dexterous manipulation of objects in robotic applications. In particular, the ability to measure and distinguish in real time normal and shear forces is crucial for slip detection and interaction with fragile objects. Here, we report a biomimetic soft electronic skin (e-skin) that is composed of an array of capacitors and capable of measuring and discriminating in real time both normal and tangential forces. It is enabled by a three-dimensional structure that mimics the interlocked dermis-epidermis interface in human skin. Moreover, pyramid microstructures arranged along nature-inspired phyllotaxis spirals resulted in an e-skin with increased sensitivity, minimal hysteresis, excellent cycling stability, and response time in the millisecond range. The e-skin provided sensing feedback for controlling a robot arm in various tasks, illustrating its potential application in robotics with tactile feedback.
Learn about our two Decals!
 Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.
Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.Berkeley BioDesign Community
 Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.
Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.

I imagine that the neurological circuits underlying these processes are governed by both 2d spacing maps with their brains as…
to reduce the impact of car accidents, it may be possible to study the force diverting physics of cockroaches to…
you see this type of head-bobbing stability in many avian creatures related to pigeons like chickens. the head ability to…
not like they taught horses how to run! this is an example of convergent evolution where both sea creatures and…
The brain functions in a similar way with neuronal connections. our brains are able to utilize the multiplicity of connections…