
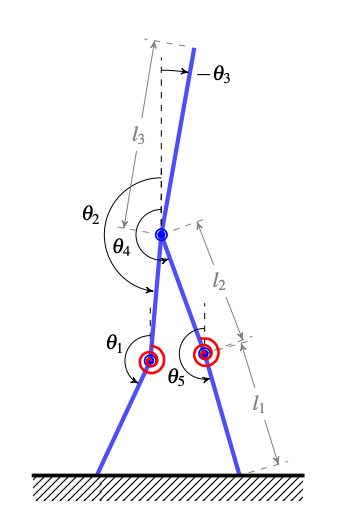
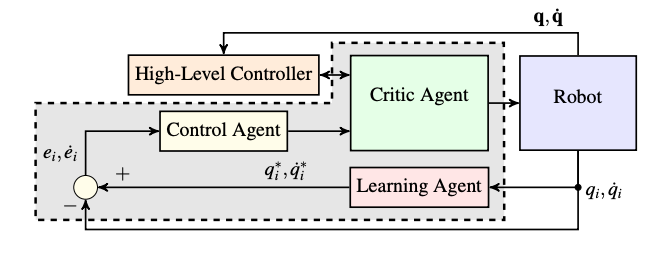

Animal walking is one of the most robust and adaptive locomotion mechanisms in the nature, involves sophisticated interactions between neural and biomechanical levels. It has been suggested that the coordination of this process is done in a hierarchy of levels. The lower layer contains autonomous interactions between muscles and spinal cord and the higher layer (e.g. the brain cortex) interferes when needed. Inspiringly, in this study we present a hierarchical control architecture with a state of the art intrinsic online learning mechanism for a dynamically walking 5-link biped robot with compliant knee joints. As the biological counterpart, the system is controlled by independent control units for each joint at the lower layer. In order to stabilize the system, these units are driven by a sensory feedback from the posture of the robot. A central stabilizing controller at the upper layer arises in case of failing the units to stabilize the system. Consequently, the units adapt themselves by including online learning mechanism. We show that using this architecture, a highly unstable system can be stabilized with identical simple controller units even though they do not have any feedback from all other units of the robot. Moreover, this architecture may help to better understand the complex motor tasks in human.
Learn about our two Decals!
 Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.
Click here to find out more about our Fall Bioinspired Design Decal and our Spring Bioinspired Design in Action Decal – ALL MAJORS are welcome.Berkeley BioDesign Community
 Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.
Click here to learn about the BioD: Bio-Inspired Design @ Berkeley student organization or here to signup for more info.

I imagine that the neurological circuits underlying these processes are governed by both 2d spacing maps with their brains as…
to reduce the impact of car accidents, it may be possible to study the force diverting physics of cockroaches to…
you see this type of head-bobbing stability in many avian creatures related to pigeons like chickens. the head ability to…
not like they taught horses how to run! this is an example of convergent evolution where both sea creatures and…
The brain functions in a similar way with neuronal connections. our brains are able to utilize the multiplicity of connections…